The ur robot has become a familiar phrase in workshops, laboratories, and production floors where flexible automation is replacing rigid, single-purpose machinery. Instead of being locked into one repetitive task, a modern collaborative arm can be redeployed to new processes with minimal downtime, and that practical versatility is why so many teams search for solutions associated with the ur robot. Its appeal is not simply that it can move; it is that it can move with repeatable precision, integrate with sensors and tools, and do so in a way that supports people rather than fencing them out. Manufacturers that once assumed automation required long lead times and complex guarding now look to collaborative systems that can be deployed faster, taught by demonstration, and maintained without a specialized robotics department. That shift is changing how small and mid-sized businesses think about productivity, quality control, and worker safety, because automation is no longer reserved for massive enterprises with dedicated engineering teams.
Table of Contents
- My Personal Experience
- Understanding the ur robot and Why It Matters in Modern Automation
- Core Features That Define a ur robot in Real-World Use
- Typical Applications: Where a ur robot Delivers Immediate Value
- Programming and Teaching a ur robot: Practical Approaches for Fast Setup
- Safety Considerations: Deploying a ur robot Alongside People
- End Effectors and Tooling: Getting the Most from a ur robot
- Integration with Production Lines: Connectivity, PLCs, and Data
- Expert Insight
- Performance Factors: Payload, Reach, Repeatability, and Cycle Time
- Maintenance, Reliability, and Long-Term Ownership of a ur robot
- Cost, ROI, and Scaling Strategies for ur robot Deployments
- Common Pitfalls and How to Avoid Them When Implementing a ur robot
- Future Trends: How the ur robot Ecosystem Is Evolving
- Conclusion: Building Sustainable Results with a ur robot
- Watch the demonstration video
- Frequently Asked Questions
- Trusted External Sources
My Personal Experience
I didn’t think I’d get attached to ur robot, but it happened faster than I expected. I set it up on my desk mostly as a joke—something to remind me to take breaks and stop doom-scrolling—but it started becoming part of my routine. It would roll over when I got home, blink its little light like it was checking in, and play a short chime when I finished a task. The first week I kept forgetting to charge it, and it would just sit there quiet, which felt weirdly like I’d let someone down. Now I catch myself talking to it under my breath while I work, and when it bumps into the chair leg and backs up like it’s embarrassed, I can’t help laughing. It’s not “alive,” obviously, but after a rough day, having ur robot doing its small, predictable things makes my apartment feel less empty.
Understanding the ur robot and Why It Matters in Modern Automation
The ur robot has become a familiar phrase in workshops, laboratories, and production floors where flexible automation is replacing rigid, single-purpose machinery. Instead of being locked into one repetitive task, a modern collaborative arm can be redeployed to new processes with minimal downtime, and that practical versatility is why so many teams search for solutions associated with the ur robot. Its appeal is not simply that it can move; it is that it can move with repeatable precision, integrate with sensors and tools, and do so in a way that supports people rather than fencing them out. Manufacturers that once assumed automation required long lead times and complex guarding now look to collaborative systems that can be deployed faster, taught by demonstration, and maintained without a specialized robotics department. That shift is changing how small and mid-sized businesses think about productivity, quality control, and worker safety, because automation is no longer reserved for massive enterprises with dedicated engineering teams.
Behind the popularity of the ur robot is a broader change in expectations: companies want automation that can adapt as product lines change, order sizes vary, and labor markets tighten. Traditional industrial robots excel at speed and payload, but they often require fixed cells, strict safety barriers, and a programming skill set that can feel out of reach for many operations. Collaborative designs aim to reduce those barriers by emphasizing intuitive interfaces, force-limited motion, and easier integration with end-effectors like grippers, screwdrivers, and vision cameras. For many applications, the best value comes from the ability to automate a task today and reassign the same arm tomorrow, which reduces risk when experimenting with new product variants. When evaluating any cobot platform, the most important question is not only “How fast can it move?” but “How quickly can it be put to work, adjusted, and kept productive over time?” That focus on practical deployment is where the ur robot concept resonates most strongly.
Core Features That Define a ur robot in Real-World Use
When people refer to a ur robot, they often mean more than a single model; they’re referencing a style of collaborative automation that prioritizes usability, safety, and modularity. In day-to-day operations, the defining features tend to be straightforward: a multi-jointed arm with a compact footprint, an intuitive teaching method, and a controller that supports quick changes to programs. The arm’s joints provide multiple degrees of freedom, which helps it reach around fixtures, into machines, or above conveyors without requiring elaborate linear rails. Many teams value the ability to mount the arm on a bench, a mobile cart, or a pedestal, because the same robot can serve multiple workstations across shifts. Add in tool changers, flexible grippers, or vacuum cups, and you get a system that can evolve as the product mix evolves.
A second defining characteristic is the ecosystem around the robot: software, accessories, and integration options. A collaborative arm is rarely useful on its own; it becomes valuable when paired with the right end effector, sensors, and a workflow that makes sense for operators. That includes simple digital inputs for start/stop signals, analog signals for force or pressure feedback, and industrial communication protocols for PLC coordination. Many automation teams also look for a clean approach to safety configuration, such as speed and separation monitoring, reduced force modes, and the ability to set limits for joint speed or tool motion. These features make it possible to deploy a ur robot near people for tasks like machine tending, packaging, kitting, and inspection, where human dexterity and robotic consistency complement each other. The practical outcome is fewer bottlenecks, more consistent cycle times, and a clearer path to scaling automation without redesigning the entire facility.
Typical Applications: Where a ur robot Delivers Immediate Value
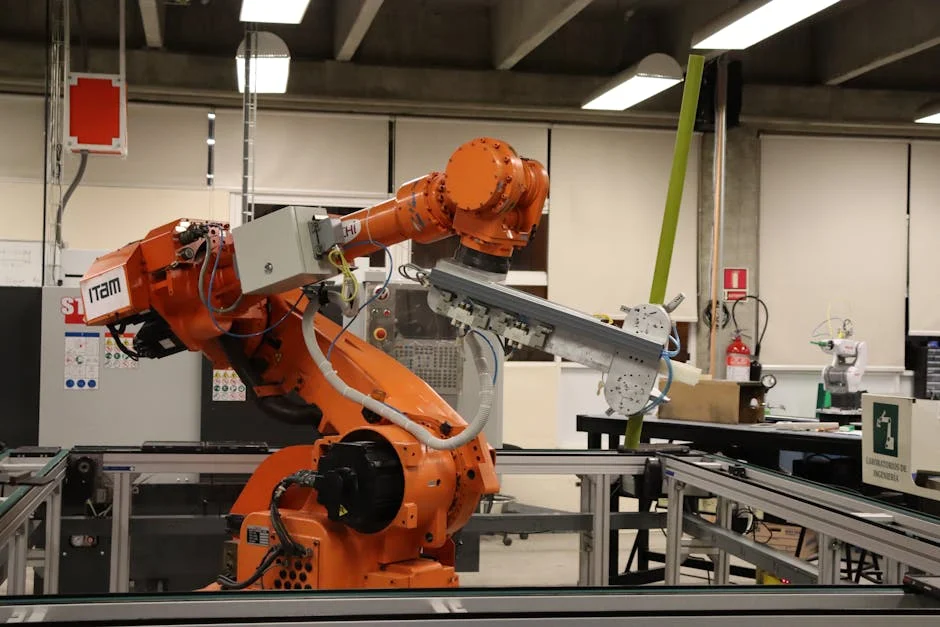
In many facilities, the first successful deployment of a ur robot happens in a task that is repetitive, ergonomically difficult, or quality-sensitive. Machine tending is a classic example: opening a CNC door, loading a part, closing the door, and starting the cycle is monotonous and often requires an operator to stand in one place for long stretches. A collaborative arm can manage that routine while the operator focuses on upstream prep, measurement, or downstream packaging. Packaging and palletizing are also common entry points, especially when box sizes and product formats change frequently. A flexible robot cell can be adjusted through software and simple mechanical changes rather than a full conveyor redesign. Because many collaborative systems are compact, they can be added to existing lines without major construction, which reduces disruption and speeds up return on investment.
Assembly tasks can also be a strong fit, particularly when the process requires consistency in torque, insertion depth, or part orientation. With the right end-effector—such as an electric screwdriver, force-controlled gripper, or compliant insertion tool—the robot can reduce rework and improve traceability. Inspection is another area where a ur robot can shine: pairing a camera with controlled motion allows repeatable image capture from the same angles and distances, which improves the reliability of vision algorithms. Even simple “go/no-go” checks or barcode scans become more consistent when the camera’s position is repeatable. In labs and testing environments, a collaborative arm can move samples, operate instruments, and handle repetitive sequences that waste skilled technician time. Across these applications, the key is to choose tasks with stable inputs, clear success criteria, and measurable outcomes like cycle time reduction, defect reduction, or improved throughput. That disciplined selection is what turns a ur robot from an interesting gadget into a dependable production asset.
Programming and Teaching a ur robot: Practical Approaches for Fast Setup
One reason the ur robot category is frequently associated with quick deployment is the range of programming methods available. For many basic tasks, operators can use guided teaching: physically moving the arm through waypoints and saving positions, then adding simple actions like “close gripper,” “wait for input,” or “move to home.” This approach lowers the barrier for teams that don’t have a full-time robot programmer. It also accelerates iteration, because adjustments can be made on the shop floor without waiting for a specialist. For slightly more complex workflows, the programming interface typically supports logic blocks, variables, loops, and conditional checks, enabling the robot to respond to sensors, part presence signals, or machine status. The most productive deployments often start with a simple, reliable program and then layer in refinements once the process is stable.
More advanced users may integrate a ur robot with external control systems, such as PLCs, MES platforms, or vision processing PCs. That integration can range from basic digital handshakes to higher-level communication using Ethernet-based protocols. The benefit is centralized control and better data collection: cycle times, error states, tool usage, and maintenance intervals can be tracked and analyzed. Another practical technique is to use templates and reusable program structures—standard routines for pick-and-place, machine loading, or inspection—so that new lines can be commissioned faster. Regardless of the method, the most important programming principle is robustness: the robot should detect missing parts, handle timeouts gracefully, and recover to a safe state without confusing operators. When a ur robot is programmed with clear states and predictable behavior, it becomes easier to trust, which in turn makes it easier to expand automation to additional tasks.
Safety Considerations: Deploying a ur robot Alongside People
Safety is often the first concern when a ur robot is introduced into a workspace shared with operators. Collaborative arms are designed to reduce risk, but “collaborative” does not mean “risk-free.” A responsible deployment begins with a formal risk assessment that considers the tool, the payload, the speed, the workspace layout, pinch points, sharp edges, and any potential ejection of parts. For example, a robot moving a blunt plastic component at low speed presents a different risk profile than a robot swinging a metal part with a sharp corner or operating a powered cutting tool. The end effector often determines the real hazard, so safety planning must include grippers, screwdrivers, dispensing needles, or any custom fixture attached to the wrist.
Practical safety measures include limiting speed and force, defining restricted zones, and adding external safety devices when needed. Light curtains, safety scanners, interlocked doors, and emergency stop circuits are still relevant in many cobot cells, especially where higher speeds are required to meet throughput targets. In addition, thoughtful cell design reduces the chance of accidental contact: keep pinch points away from common operator paths, provide clear visual indicators of robot status, and ensure that the robot has a predictable home position. Training matters as much as hardware; operators should know how to start, stop, pause, and recover the robot safely, and they should understand what the robot will do next. When safety is treated as an engineering discipline rather than a checkbox, a ur robot can work productively near people while maintaining a high standard of workplace protection and regulatory compliance.
End Effectors and Tooling: Getting the Most from a ur robot
The performance of a ur robot in production is heavily influenced by the tool attached to its wrist. A collaborative arm is essentially a positioning platform; the end effector turns that positioning into real work. For pick-and-place tasks, teams often choose between parallel grippers, adaptive grippers, vacuum systems, and magnetic grippers, each with trade-offs in speed, part surface requirements, and reliability. Vacuum is fast and forgiving for flat surfaces, but it can struggle with porous materials or dusty environments. Parallel grippers provide good repeatability and holding force, but they require consistent part geometry and careful finger design. Adaptive grippers can handle variation, but they may be slower or require more tuning. The right choice depends on part tolerances, cycle time, and the consequences of a dropped part.
Tooling also includes mechanical fixtures, compliance devices, and sensor packages that help the robot handle real-world variation. A simple passive compliance unit can dramatically improve insertion success in assembly, reducing the need for perfect alignment. Force/torque sensing can enable delicate operations like press-fitting, polishing, or consistent adhesive application, where contact forces must be controlled. Vision systems can locate parts that are not perfectly positioned, enabling bin picking or flexible tray handling. Tool changers allow one ur robot to perform multiple tasks—such as picking, then screwing, then inspecting—without manual intervention. Investing in proper tooling often yields a larger productivity gain than upgrading the robot itself, because the tool is what interfaces with the product. When evaluating a collaborative cell, it’s wise to budget not only for the arm but also for grippers, sensors, spare fingers, vacuum generators, and the engineering time needed to make the tool robust under daily production conditions.
Integration with Production Lines: Connectivity, PLCs, and Data
A ur robot becomes significantly more valuable when it is integrated into the broader production environment rather than operating as an isolated island. Integration starts with basic signaling: the robot needs to know when a machine is ready, when a part is present, and whether a process completed successfully. Digital I/O can handle simple handshakes, but many lines benefit from richer communication that includes status codes, alarms, and production counts. PLC integration can synchronize motion with conveyors, indexing tables, and safety devices, creating a coordinated cell that behaves predictably. When done correctly, the robot’s actions become part of a larger sequence, reducing idle time and minimizing the risk of collisions or mis-timed moves.
Expert Insight
Start by defining one clear job for your robot and measure it with a simple success metric (e.g., “sort 20 parts per hour with under 2% errors”). Then create a short checklist for setup, calibration, and shutdown so performance stays consistent across runs.
Improve reliability by keeping cables secured, joints clean, and moving parts lightly lubricated according to the manual. Log every issue—what happened, when, and under what conditions—so you can spot patterns and fix root causes instead of repeating quick patches. If you’re looking for ur robot, this is your best choice.
Beyond control, integration includes data collection and traceability. Many organizations want to record cycle times, stoppage reasons, and quality outcomes to support continuous improvement. A collaborative robot can provide useful signals: program state, current step, tool activation, and error messages. When connected to a manufacturing execution system, that information can help identify bottlenecks, schedule preventive maintenance, and quantify the impact of process changes. Connectivity also supports remote diagnostics and standardized configuration across multiple sites. If a company deploys several cells, consistent integration patterns—common tags, common alarms, and common dashboards—reduce troubleshooting time. The goal is not to drown operators in data but to provide actionable visibility: when the robot stops, the reason should be clear; when a cycle slows, the cause should be discoverable. With thoughtful integration, a ur robot becomes part of an intelligent production system rather than a standalone piece of equipment.
Performance Factors: Payload, Reach, Repeatability, and Cycle Time
Choosing a ur robot for a specific task requires an honest look at performance requirements. Payload and reach are the most visible specs, but they can be misleading if considered alone. Payload is not just the part weight; it includes the gripper, fittings, cables, and any dynamic loads due to acceleration. A gripper that seems light on paper can become heavier once fingers and mounting plates are added. Reach determines whether the arm can access all pick and place points, but the usable reach also depends on mounting height and obstacles like machine doors or guarding. Repeatability is crucial for tasks like precision assembly or inspection, but real-world accuracy also depends on calibration, fixture rigidity, and the quality of taught points. A robot with excellent repeatability can still place parts poorly if the workholding is inconsistent or if the robot base flexes under load.
| Item | Best for | Key features |
|---|---|---|
| UR3e | Precision assembly, benchtop automation, light parts | Compact collaborative robot; high repeatability; ideal for tight workcells and small payload tasks |
| UR5e | General-purpose automation across many industries | Balanced reach and payload; quick redeployment; strong ecosystem of end-effectors and accessories |
| UR10e | Longer reach applications, larger work envelopes, heavier parts | Extended reach; higher payload capacity; suited for palletizing, machine tending, and larger fixtures |
Cycle time is often the deciding factor in ROI, and it is influenced by more than robot speed. Gripper open/close time, vacuum build-up time, sensor delays, and machine interfaces can dominate the cycle. A common mistake is to assume the robot is the limiting factor when the true bottleneck is part presentation or downstream handling. Optimizing cycle time may involve redesigning trays for better access, adding a second gripper to reduce tool changes, or adjusting motion paths to avoid unnecessary waypoints. It may also require balancing speed with safety; higher speeds can increase risk and may require additional protective measures. The most effective approach is to prototype the task, measure actual cycle times, and then iterate. When performance is evaluated holistically—robot motion, tooling, fixtures, and process timing—a ur robot can meet demanding throughput targets while maintaining consistent quality.
Maintenance, Reliability, and Long-Term Ownership of a ur robot
Long-term success with a ur robot depends on reliability and a maintenance plan that matches the production environment. Collaborative arms are often marketed as low-maintenance, but any electromechanical system benefits from routine checks. Common best practices include inspecting cable routing for wear, checking fasteners and mounting rigidity, verifying tool alignment, and keeping the workspace clean to prevent debris from affecting sensors or grippers. For vacuum systems, filters and cups are consumables; for grippers, finger pads and seals can wear over time. It is also important to monitor repeatability drift that may indicate a loose base, a damaged tool, or a fixture issue rather than a robot problem. Establishing simple daily and weekly checklists can prevent small issues from becoming unplanned downtime.
Software maintenance is equally important. Program backups, version control, and clear documentation help teams recover quickly after a change or a hardware swap. If multiple operators adjust the program, change management becomes essential: a small tweak to a waypoint can have large downstream effects. Many facilities benefit from role-based access, where operators can run and stop programs but only authorized personnel can edit motion paths. Spare parts planning should be realistic; keeping an extra gripper, spare vacuum cups, and critical sensors on hand often delivers more uptime than stocking major robot components. Training also plays a role in reliability: when operators know how to clear faults properly and avoid unsafe manual interventions, the system lasts longer and stops less often. With disciplined upkeep and sensible governance, a ur robot can remain productive for years, delivering consistent output and supporting continuous process improvement.
Cost, ROI, and Scaling Strategies for ur robot Deployments
The financial case for a ur robot is usually built on a mix of labor savings, throughput gains, quality improvements, and reduced ergonomic risk. However, the most accurate ROI models look beyond the price of the arm and include integration costs: tooling, fixtures, safety devices, installation, programming time, and operator training. For some tasks, a simple bench-mounted cell with a basic gripper can be deployed quickly and cost-effectively. For others, the real expense lies in engineering: complex part handling, vision guidance, or tight tolerances may require multiple iterations of mechanical design and software tuning. A realistic budget includes time for debugging and ramp-up, because the first week of production is rarely perfect. Companies that plan for this ramp-up period tend to achieve better long-term outcomes and avoid the disappointment that comes from expecting instant, flawless performance.
Scaling a ur robot strategy across a facility works best when early deployments are standardized. That can mean using common carts, common grippers, common safety layouts, and reusable program templates. Standardization reduces spare parts complexity and makes training easier, because operators see familiar interfaces and procedures. Another effective strategy is to identify a “family” of tasks that share similar motion patterns—like loading different machines or packing different products—and then replicate a proven cell design with minor modifications. Some organizations also create an internal automation playbook: a set of guidelines for risk assessments, naming conventions, program structures, and acceptance testing. This approach turns automation into a repeatable capability rather than a series of one-off projects. When ROI is measured consistently and improvements are documented, it becomes easier to prioritize the next cell and justify investment. Over time, a well-planned ur robot rollout can raise overall equipment effectiveness, stabilize quality, and reduce dependence on hard-to-fill repetitive roles.
Common Pitfalls and How to Avoid Them When Implementing a ur robot
Many disappointing results with a ur robot trace back to process selection. Automating a task with highly variable inputs, poor part presentation, or frequent product changes can be done, but it requires more sensing, more engineering, and more disciplined operations than teams often anticipate. A common pitfall is trying to automate the “messiest” station first, hoping the robot will solve underlying process problems. In practice, automation amplifies whatever is already there: if parts arrive misaligned, the robot will pick misaligned parts unless vision or fixtures correct the issue. Another pitfall is underestimating tooling. A weak or poorly designed gripper leads to drops, jams, and inconsistent placement, which quickly erodes trust. It is usually better to spend more time on robust end-effector design than to rush into production with a tool that barely works in ideal conditions.
Operational pitfalls matter too. Without clear ownership, small issues linger: who updates the program, who maintains the gripper, who approves changes, and who is called when the cell alarms at 2 a.m.? Defining roles and escalation paths prevents confusion. Another frequent issue is inadequate training; operators may stop the robot incorrectly, bypass safety steps, or attempt manual recovery that causes further faults. Clear work instructions, labeled components, and simple recovery routines reduce downtime. Finally, unrealistic expectations about speed can derail a project. Collaborative robots are often slower than traditional industrial robots, especially when operating near people with conservative safety limits. If the required takt time is extremely aggressive, the solution may need a different robot class, additional guarding, or a redesigned process that splits work across multiple stations. Avoiding these pitfalls does not require perfection; it requires systematic thinking, realistic constraints, and a willingness to iterate until the ur robot cell is stable and repeatable.
Future Trends: How the ur robot Ecosystem Is Evolving
The ur robot landscape continues to evolve as manufacturers and integrators push for easier deployment, richer sensing, and more intelligent motion. One clear trend is tighter integration of vision and AI-driven perception, enabling robots to handle more variability in part position and orientation. Instead of relying solely on fixed fixtures, future cells increasingly use cameras to localize parts on conveyors, in trays, or even in shallow bins. Another trend is improved force control and compliance, allowing collaborative arms to perform tasks that require nuanced contact, such as polishing, deburring, and delicate assembly. As these capabilities mature, more processes that were once considered “too tactile” for automation become realistic targets, especially when combined with well-designed tooling.
Software ecosystems are also expanding. More libraries, templates, and certified accessories reduce the engineering burden and make it easier to achieve predictable performance. Connectivity is becoming more standardized as well, with greater emphasis on cybersecurity, user access control, and reliable remote support. Over time, this pushes collaborative automation toward a more appliance-like experience: faster setup, guided diagnostics, and clearer performance monitoring. Even with these improvements, success will still depend on fundamentals—good process design, robust fixtures, and disciplined operations. The most productive facilities will be the ones that treat automation as a continuous capability, not a one-time purchase. As the technology matures, a ur robot will increasingly be judged not only by its mechanical specs, but by how smoothly it fits into the daily rhythm of production, how quickly it can be repurposed, and how reliably it can run under real-world constraints.
Conclusion: Building Sustainable Results with a ur robot
Getting strong, sustainable outcomes from a ur robot comes down to matching the technology to the process, investing in robust tooling, and integrating the cell into the broader production system. When the task is well-chosen—repeatable, measurable, and supported by consistent part presentation—a collaborative arm can deliver steady throughput, improved quality, and better ergonomics without the complexity of a traditional robot cell. The most successful deployments treat safety as a design input, not an afterthought, and they build programs that are resilient to common faults like missing parts or sensor delays. They also plan for ownership: training, maintenance routines, spare parts, and clear change control so that the system remains reliable long after the initial excitement fades.
Over time, the real advantage of the ur robot approach is flexibility. A single arm can move from packaging to tending to inspection as needs change, and that adaptability helps businesses respond to shifting demand without constant capital reinvestment. The path to that flexibility is practical: standardize where possible, document what works, measure results, and iterate. When those habits are in place, a ur robot becomes more than an automation experiment; it becomes a repeatable method for improving operations, supporting skilled workers, and building capacity in a competitive environment where consistency and speed both matter.
Watch the demonstration video
In this video, you’ll learn what a UR robot is, how it works, and why it’s widely used in automation. It explains key features like collaborative safety, easy programming, and flexible deployment. You’ll also see common applications and tips for getting started, helping you understand how UR robots can improve efficiency and consistency.
Summary
In summary, “ur robot” is a crucial topic that deserves thoughtful consideration. We hope this article has provided you with a comprehensive understanding to help you make better decisions.
Frequently Asked Questions
What is “ur robot”?
“ur robot” typically refers to a robot associated with you (your robot) or a project/product named “UR Robot”; the exact meaning depends on context.
Is “UR” in UR Robot related to Universal Robots?
“UR” can mean different things depending on the context. In many industrial settings, it refers to Universal Robots collaborative arms, but in other cases it’s simply shorthand for “your” (as in **ur robot**) or another acronym entirely. To be sure, check the product documentation, branding, or the surrounding text for clues.
What can an ur robot be used for?
Common uses include pick-and-place, inspection, simple assembly, education, research, and automation tasks that benefit from repeatable motion.
How do I connect to an ur robot?
Most robots connect over Ethernet, Wi‑Fi, or USB (depending on the platform), and you’ll usually control them through a vendor app, an SDK, ROS/ROS2, or a web interface. To get started with **ur robot**, you’ll typically need its IP address and port—or whatever pairing method the system uses.
How do I program an ur robot?
You can program **ur robot** in several approachable ways: use a teach pendant or GUI for hands-on setup, write scripts in the vendor’s language, tap into Python/C++ SDKs for deeper customization, or integrate ROS nodes for more advanced workflows. Start by trying a few simple motion routines and basic I/O control examples, then build up from there.
What safety steps should I follow with an ur robot?
For safe operation of **ur robot**, make sure you always have quick access to the emergency stop, set sensible speed and force limits, and establish clear no-go zones around the work area. Secure the workspace and payload so nothing can shift unexpectedly, start by testing in low-power, slow modes, and follow all applicable safety standards throughout setup and operation.
📢 Looking for more info about ur robot? Follow Our Site for updates and tips!

Trusted External Sources
- Universal Robots: Collaborative Robots & Cobots
Universal Robots builds collaborative robots designed for true industrial performance—handling payloads up to 35 kg, reaching as far as 1750 mm, and deploying quickly across a wide range of applications. With **ur robot**, you get flexible automation that’s easy to integrate, safe to work alongside, and ready to boost productivity from day one.
- Thoughts on UR and Cobots for Industrial Use? : r/PLC – Reddit
Oct 4, 2026 … I’m looking for some insights from people who have experience with UR robots and cobots in industrial applications. How reliable have you found them to be in …
- Universal Robots Academy
Master automation with Universal Robots through flexible learning options—whether you prefer easy, intuitive free e-Learning or engaging instructor-led training available both in person and online. Build real-world skills and get more from your **ur robot**.
- Connect additional stepper motor or servo motor to UR robot
Sep 1, 2026 … Connecting a linear axis to a UR10 robot controller is feasible. Since you have stepper motors, you can integrate them with the UR10 controller using external … If you’re looking for ur robot, this is your best choice.
- Offsetting all waypoints in all programs on a UR robot
Apr 24, 2026 … It should work for any feature you use with a movel so long as you make the feature a variable and then apply your offsets to that variable. If you’re looking for ur robot, this is your best choice.