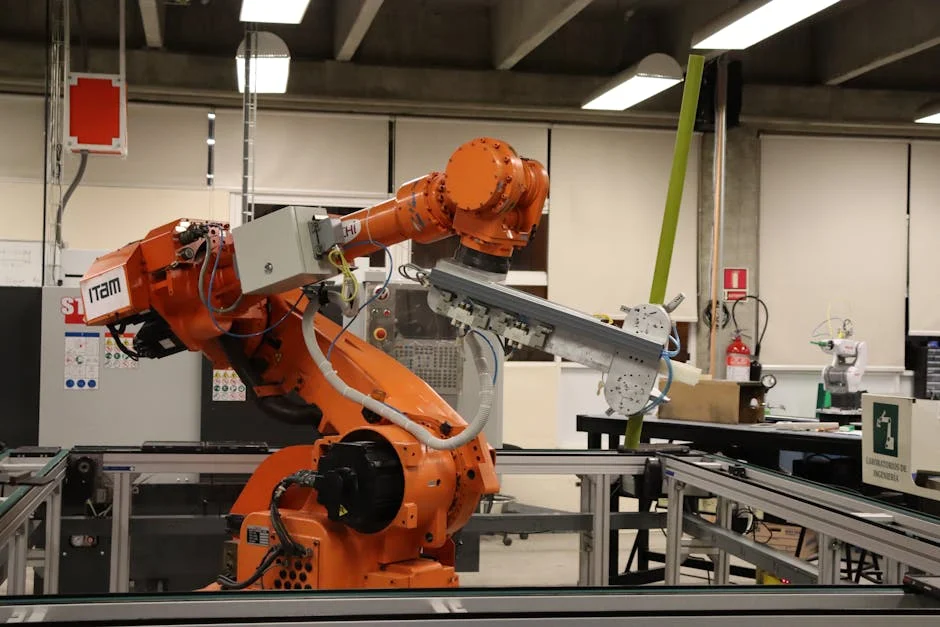
A robotic arm is a programmable mechanical device designed to move, lift, place, and manipulate objects with speed and repeatable accuracy. It often resembles a human arm in the sense that it has segments and joints, but its purpose is less about imitation and more about reliable motion control. In factories, laboratories, hospitals, and warehouses, a robotic arm can perform tasks that would otherwise require constant human attention, high physical effort, or exposure to hazards. The value comes from consistency: once the motion path and the parameters are tuned, the robotic arm can repeat the same action thousands of times with minimal variation. That repeatability is a cornerstone for quality control, whether the job is assembling tiny electronics, welding automotive frames, dispensing adhesives, or packing products into cartons. Even when the environment changes, sensors and feedback loops allow the system to adjust, making it far more than a rigid machine executing a fixed script.
Table of Contents
- My Personal Experience
- Understanding the Robotic Arm and Why It Matters
- Core Components: Mechanics, Joints, and Structural Design
- Actuators and Drives: How Motion Is Created
- Control Systems, Programming, and Motion Planning
- End Effectors: Grippers, Tools, and Quick-Change Systems
- Sensing and Vision: Making a Robotic Arm Responsive
- Industrial Applications: Assembly, Welding, Packaging, and More
- Collaborative Robots and Safety Considerations
- Expert Insight
- Integration with Production Lines: Communication and Workflow
- Performance Metrics: Payload, Reach, Accuracy, and Cycle Time
- Maintenance, Reliability, and Lifecycle Costs
- Trends and Innovations: AI, Digital Twins, and Advanced Materials
- Choosing the Right Robotic Arm for a Specific Use Case
- Conclusion: Building Long-Term Value with a Robotic Arm
- Watch the demonstration video
- Frequently Asked Questions
- Trusted External Sources
My Personal Experience
The first time I used a robotic arm was during a lab session at my community college, and I was surprised by how “alive” it felt once it started moving. We were programming it to pick up small plastic blocks and place them into a tray, and I remember my hands shaking a little as I hit run, half expecting it to jerk or crash. Instead, it moved in these smooth, deliberate arcs—until my code was off by a few millimeters and the gripper clipped the edge of the table with a sharp tap. After a few tweaks to the coordinates and speed, it finally nailed the sequence, block after block, and I felt this weird mix of relief and pride, like I’d taught something mechanical to be careful. Walking out of the lab, I kept thinking about how much trust you have to build with a machine before you’re comfortable standing close to it.
Understanding the Robotic Arm and Why It Matters
A robotic arm is a programmable mechanical device designed to move, lift, place, and manipulate objects with speed and repeatable accuracy. It often resembles a human arm in the sense that it has segments and joints, but its purpose is less about imitation and more about reliable motion control. In factories, laboratories, hospitals, and warehouses, a robotic arm can perform tasks that would otherwise require constant human attention, high physical effort, or exposure to hazards. The value comes from consistency: once the motion path and the parameters are tuned, the robotic arm can repeat the same action thousands of times with minimal variation. That repeatability is a cornerstone for quality control, whether the job is assembling tiny electronics, welding automotive frames, dispensing adhesives, or packing products into cartons. Even when the environment changes, sensors and feedback loops allow the system to adjust, making it far more than a rigid machine executing a fixed script.
Beyond manufacturing, the robotic arm has become a symbol of modern automation because it sits at the intersection of mechanics, electronics, and software. Gears, belts, bearings, and structural materials determine stiffness and payload capacity, while motors and drives decide how smoothly joints move. Encoders measure joint position, and controllers compute the next motion step, often hundreds or thousands of times per second. This blend of disciplines makes a robotic arm adaptable: change the end effector, modify the program, and the same platform can handle a new product line or a different type of operation. For businesses, that flexibility can mean shorter changeover times and less wasted capacity. For engineers and technicians, it introduces a structured way to standardize motion, document process settings, and track performance over time. The result is an ecosystem where automation is not only about speed, but also about traceability, safer working conditions, and the ability to scale production without sacrificing precision.
Core Components: Mechanics, Joints, and Structural Design
The physical architecture of a robotic arm largely determines what it can do. Most designs use multiple rigid links connected by joints to create a kinematic chain. The number of joints—often referred to as degrees of freedom—dictates how freely the arm can position and orient its tool in space. A common industrial configuration is a six-axis articulated arm, which can reach around obstacles and present the tool at complex angles. Other formats, such as SCARA, delta, or Cartesian systems, prioritize speed, planar motion, or straightforward linear travel. Each structure has tradeoffs: articulated designs offer versatility, Cartesian frames offer simpler programming and high rigidity, and delta robots excel at high-speed pick-and-place of light items. Choosing the right architecture means matching reach, payload, speed, and precision to the process. If the job involves heavy parts, the arm needs a robust base and joints with high torque capacity; if it involves delicate components, low friction, smooth motion, and fine resolution matter more.
Inside each joint, the mechanical design is a careful balance of strength and efficiency. Harmonic drives, cycloidal reducers, planetary gearboxes, and belt systems are common reduction mechanisms that trade motor speed for usable torque. Reduction improves resolution and holding power, but it can introduce backlash and compliance if not engineered properly. Many high-precision robotic arm models use gear systems optimized for minimal backlash, paired with stiff link materials such as aluminum alloys, steel, or carbon fiber composites. Cable routing is another crucial mechanical consideration: power lines, sensor cables, and pneumatic tubes must flex reliably through continuous motion without snagging or fatigue failure. Manufacturers often route services through internal channels to protect them and reduce interference. The end-of-arm flange, where grippers or tools attach, is standardized in many systems to simplify tool changes. Mechanical design may look like a purely physical concern, but it directly affects control performance: a stiffer structure allows more aggressive acceleration without vibration, while a more compliant structure may require gentler motion profiles to maintain accuracy and avoid oscillation.
Actuators and Drives: How Motion Is Created
Motion in a robotic arm is produced by actuators—typically electric servo motors—paired with drives that regulate current, torque, and speed. Servo systems dominate because they provide precise, closed-loop control. The controller sends a command, the drive energizes the motor accordingly, and feedback devices confirm what actually happened. Stepper motors appear in lower-cost or lighter-duty arms, but they generally lack the same dynamic performance and torque density as servos, especially at higher speeds. In heavy-duty industrial environments, servo motors with high-resolution encoders enable smooth interpolation of multi-axis motion. That interpolation is critical when the tool must follow a continuous path, such as a weld seam, a dispensing bead, or a polishing trajectory. The quality of motion depends not only on the motor but also on the tuning of the control loops—current, velocity, and position—and the mechanical transmission that connects the motor to the joint.
Pneumatic and hydraulic actuation still plays a role in some robotic arm applications, though often more for end effectors than for the arm itself. Pneumatics offer fast response and simple hardware for gripping and clamping, while hydraulics deliver exceptional force and robustness for extreme payloads. However, electric actuation has surged due to cleanliness, efficiency, and ease of integration with sensors and digital controls. Modern drives also support advanced safety functions, such as safe torque off and safe limited speed, which help reduce risk in collaborative or semi-collaborative environments. Energy management has become a design focus as well: regenerative braking can return energy to the DC bus during deceleration, and intelligent motion planning can reduce peak power demand. When evaluating a robotic arm, it helps to consider not only peak payload ratings, but also continuous duty performance, thermal limits, and how the drive system behaves under repetitive cycles. A stable, well-matched actuator and drive package is often the difference between a system that runs reliably for years and one that requires constant retuning and maintenance.
Control Systems, Programming, and Motion Planning
The “brain” of a robotic arm is its controller, which converts high-level tasks into coordinated joint movements. At the lowest level, the controller executes real-time control loops that keep each axis on target. At a higher level, it calculates kinematics—mapping the desired tool position and orientation into joint angles—and plans trajectories that respect speed, acceleration, and jerk limits. This is essential for both performance and longevity: a path that is too aggressive can cause vibration, poor surface finish, or premature wear on gearboxes and bearings. Many controllers also include collision detection or torque monitoring to stop the arm when unexpected resistance is encountered. In structured industrial settings, programs are often built with teach pendants, where operators jog the arm to points and record them, then add logic for loops, sensor checks, and conditional branching. More advanced deployments use offline programming, where engineers simulate the robotic arm in a digital environment, verify reach and cycle time, and then deploy the code with minimal downtime.
Programming approaches vary from vendor-specific languages to standardized interfaces and modern APIs. Traditional robot languages remain popular because they are optimized for deterministic motion and are supported by mature tooling. However, integration needs are pushing systems toward open communication: Ethernet-based industrial networks, real-time fieldbuses, and higher-level protocols allow the robotic arm to coordinate with conveyors, vision systems, safety controllers, and manufacturing execution software. Motion planning increasingly incorporates sensor feedback, particularly for tasks where part position varies. For example, a vision-guided pick routine may detect an object’s pose, compute an approach path, and then adjust the final motion in real time. Force control adds another layer: instead of commanding only position, the controller regulates contact force, useful in sanding, deburring, insertion, and delicate handling. The best control strategies combine predictable path execution with adaptability. That combination enables a robotic arm to handle natural variation in materials and fixtures while still meeting tight tolerances, which is often the defining requirement in high-mix production environments.
End Effectors: Grippers, Tools, and Quick-Change Systems
What a robotic arm can accomplish depends heavily on its end effector—the device attached at the wrist that interacts with the work. Grippers are common for pick-and-place, but the category is broad: parallel jaw grippers, angular grippers, vacuum cups, magnetic grippers, and soft robotic fingers each suit different items and surfaces. For example, vacuum is excellent for boxes and smooth packaging, but less reliable on porous materials; mechanical jaws can handle irregular shapes but may require precise alignment. Tooling extends beyond gripping: welding torches, screwdrivers, dispensing valves, cutting tools, inspection probes, and polishing spindles turn the robotic arm into a multi-purpose workstation. Selecting the right end effector requires attention to payload, center of gravity, and moment loads, because the wrist joints must handle not only weight but also torque during acceleration. It also requires understanding the process—surface sensitivity, contamination risks, required clamping force, and the acceptable level of part deformation.
Quick-change systems are increasingly important because they allow a robotic arm to switch tools rapidly, supporting product variety without major downtime. Some setups use automatic tool changers with pneumatic, electrical, and data connections integrated into the coupling. That enables a single robot cell to alternate between gripping, inspection, and packaging, or to use different grippers for different SKUs. Tool identification can be automated with RFID or coded connectors, helping prevent operator error and ensuring the correct program parameters are loaded. Sensors embedded in the end effector—such as part-present switches, vacuum pressure transducers, and force-torque sensors—improve reliability and allow the controller to confirm successful picks and placements. Even the most capable robotic arm can underperform if tooling is not engineered thoughtfully. A well-designed end effector minimizes slip, reduces cycle time with efficient part release, and withstands the wear of repetitive contact. In many automation projects, the gripper or tool design becomes the true differentiator, because it’s the interface between precise robotic motion and the unpredictable complexity of real-world parts.
Sensing and Vision: Making a Robotic Arm Responsive
Sensors transform a robotic arm from a purely preprogrammed machine into a responsive system. Encoders are fundamental, providing joint position feedback that enables accurate movement. Beyond that, proximity sensors, photoelectric sensors, and limit switches help confirm part presence and fixture status. Force-torque sensors mounted at the wrist allow the robot to detect contact forces and adjust motion accordingly, which is crucial for tasks like press-fitting, inserting connectors, or polishing. Tactile sensing is gaining traction in specialized handling where fragile items require gentle contact. When combined with compliant motion control, these sensors help reduce scrap and prevent damage. Even temperature and vibration monitoring can be valuable, providing early warning of bearing wear or gearbox issues. The main advantage is not simply “more data,” but the ability to make decisions at the right moment, such as slowing down near contact, retrying a pick, or rejecting a part that is out of specification.
Machine vision is one of the most impactful additions to a robotic arm cell. Cameras and lighting, paired with vision software, can locate parts on a moving conveyor, read barcodes, inspect features, and guide the robot to pick items that are not precisely fixtured. Two-dimensional vision can handle many tasks, but three-dimensional vision and depth sensing are increasingly used for bin picking, where parts are randomly piled and occlude one another. Vision-guided robotics requires careful calibration so the camera coordinate system aligns with the robot coordinate system. It also requires robust lighting design to handle reflections, shadows, and changing ambient conditions. When implemented well, vision reduces the need for expensive custom fixtures, making automation more flexible. For operations with frequent product changes, a vision-enabled robotic arm can adapt by switching vision recipes and grasp strategies rather than requiring mechanical retooling. This capability is a major driver of automation adoption in industries with high mix and variable supply, where traditional rigid automation would be too costly or too slow to change.
Industrial Applications: Assembly, Welding, Packaging, and More
The most recognizable use of a robotic arm is in industrial automation, where it performs repetitive operations at scale. In assembly, robots place components, apply adhesives, insert fasteners, and handle parts between stations. Their advantage is repeatability: once a process is validated, the arm repeats it consistently across shifts, reducing variation caused by fatigue or inconsistent technique. In welding, particularly in automotive and heavy fabrication, robotic welding provides stable torch angles, controlled travel speed, and consistent bead formation. That consistency improves structural quality and reduces rework. In packaging, robotic arms pick products, place them into trays, pack cases, and palletize boxes. High-speed pick-and-place robots can handle thousands of picks per hour, often supported by conveyors and vision systems that synchronize motion with moving products.
Other industrial processes benefit just as much. In machine tending, a robotic arm loads raw parts into CNC machines and removes finished pieces, enabling lights-out manufacturing and better spindle utilization. In finishing, robots sand, polish, deburr, and paint; these tasks are messy, sometimes hazardous, and hard to keep consistent manually. In electronics, small robotic arms handle delicate components, apply solder paste, or place parts with high precision. In food and beverage, hygienic designs and washdown-rated robots handle packaging and sorting while meeting sanitation requirements. Across these domains, the return on investment often comes from multiple factors: higher throughput, fewer defects, improved worker safety, and better data collection. A robotic arm can log cycle counts, error events, and process parameters, enabling continuous improvement. The decision to automate is rarely about replacing people; it is often about reallocating human skill to tasks that require judgment, troubleshooting, and process optimization while the robot handles the repetitive motion that machines do best.
Collaborative Robots and Safety Considerations
Collaborative robotic arm systems—often called cobots—are designed to operate with reduced guarding in certain applications, using force limiting, speed monitoring, and safer mechanical designs. They are not inherently “safe” in every scenario; safety depends on the risk assessment, the tool, the payload, and the task. A cobot moving slowly with rounded edges may be appropriate for a light assembly assist, but the same arm with a sharp tool or a heavy payload introduces new hazards. Safety standards and best practices emphasize assessing pinch points, impact risks, and unintended motion. Many installations use a combination of safety-rated monitored stops, area scanners, light curtains, and physical barriers. Even with collaborative features, careful layout is essential: keep clear zones around the base, manage cable runs, and ensure the workpiece cannot become a projectile due to sudden release or collision.
| Type of robotic arm | Best for | Key strengths |
|---|---|---|
| Articulated (6-axis) | General-purpose automation (pick-and-place, welding, machine tending) | High flexibility and reach; handles complex paths; wide tooling compatibility |
| SCARA | Fast, precise assembly on a plane (electronics, packaging, small parts) | Very high speed; excellent repeatability; compact footprint |
| Cobot (collaborative arm) | Human-robot shared workspaces (light assembly, inspection, kitting) | Built-in safety features; easier deployment and redeployment; lower integration overhead |
Expert Insight
Start by defining the arm’s payload, reach, and required repeatability, then validate those numbers with a simple end-effector mockup and a test cycle. This prevents overspending on capacity you don’t need and avoids under-specifying torque, stiffness, or mounting that can cause vibration and missed picks. If you’re looking for robotic arm, this is your best choice.
Improve reliability by standardizing tooling and maintenance: use quick-change end-effectors with keyed alignment, route cables through managed dress packs, and set a weekly checklist for fastener torque, lubrication, and encoder/limit checks. Pair this with a short teach-and-verify routine after any tooling change to catch drift before it impacts production. If you’re looking for robotic arm, this is your best choice.
Industrial robotic arm systems typically rely on guarding, interlocks, and controlled access to prevent human entry into the robot’s operating envelope during automatic mode. Teaching and maintenance modes allow slower movement with enabling devices so technicians can work near the robot more safely. Modern safety controllers integrate emergency stops, gate switches, safe speed limits, and safe position monitoring. Tooling safety is just as important as arm safety: grippers should maintain holding force during power loss when required, and vacuum systems should include check valves or part-detection to prevent drops. For welding and cutting, additional hazards include fumes, heat, and spatter, requiring ventilation and protective enclosures. The most effective safety approach treats the robotic arm cell as a complete system—robot, tool, fixtures, sensors, and human workflow—rather than focusing only on the robot’s specifications. When safety is designed in from the start, automation can reduce strain injuries, minimize exposure to dangerous processes, and create a more predictable work environment without sacrificing productivity.
Integration with Production Lines: Communication and Workflow
A robotic arm rarely operates alone; it is usually part of a larger production workflow that includes conveyors, feeders, fixtures, inspection stations, and upstream and downstream machines. Integration begins with defining how parts arrive, how they are presented, and what happens after the robot completes its task. If parts are consistently oriented, simple fixtures can speed up cycles and reduce sensing complexity. If parts vary, vision and adaptive gripping become more important. Communication between the robot and other equipment is handled through industrial networks and digital I/O. Real-time signals coordinate actions such as “part ready,” “clamp closed,” “cycle complete,” and “fault.” Higher-level communication can include recipe selection, product tracking, and quality data exchange with factory systems. The goal is to avoid bottlenecks: the robotic arm’s cycle time must match the line’s takt time, and buffer zones must be designed so small interruptions do not cascade into long stoppages.
Successful integration also depends on human workflow. Operators need clear interfaces for starting jobs, selecting product variants, and responding to alarms. Maintenance teams need access for lubrication, inspection, and tool replacement. Changeover procedures should be standardized so switching from one product to another does not require extensive re-teaching. Many facilities use modular cells, where a robotic arm and its tooling are mounted on a base with standardized connections. That makes it easier to redeploy automation as demand shifts. Data integration is increasingly valuable: by logging downtime reasons, pick success rates, and quality outcomes, teams can identify improvements such as better part presentation, revised motion paths, or more reliable grippers. When a robotic arm is integrated thoughtfully, it becomes a stable, predictable part of the line rather than a fragile “black box.” The most resilient systems are designed with clear handshakes, conservative recovery routines after faults, and diagnostics that help technicians quickly isolate whether a problem is mechanical, electrical, or process-related.
Performance Metrics: Payload, Reach, Accuracy, and Cycle Time
Evaluating a robotic arm requires understanding several key performance metrics and how they interact. Payload is the maximum weight the arm can handle at a specified reach and motion profile, but it is not the whole story. The center of gravity of the tool and part affects wrist torque, and fast acceleration increases dynamic loads. Reach defines the workspace, but real applications often need more than a simple radius; they need access angles, clearance around fixtures, and the ability to orient the tool properly. Accuracy and repeatability are often confused: repeatability measures how consistently the arm returns to the same point, while accuracy measures how close it gets to the intended absolute position. Many industrial robots have excellent repeatability but require calibration and compensation to improve absolute accuracy, especially for processes like drilling or machining where precise placement in a global coordinate system matters.
Cycle time is influenced by acceleration limits, path length, and how much time is spent on non-motion actions such as gripping, sensing, and waiting for other equipment. A robotic arm can be extremely fast, but overly aggressive motion can reduce quality or increase maintenance. That is why motion profiles are often tuned to balance throughput with smoothness. Additional factors include stiffness, which affects how the tool deflects under load, and compliance, which can either be a problem (in precision placement) or an advantage (in force-controlled tasks). Environmental conditions also matter: temperature changes can affect calibration, and dusty or wet environments may require protective covers or specific IP ratings. When comparing options, it helps to define real process requirements—part weight, required orientation, takt time, and quality tolerances—then choose an arm with a margin that accounts for tool weight, future product changes, and wear over time. A well-chosen robotic arm is not just capable on day one; it remains capable as the process evolves.
Maintenance, Reliability, and Lifecycle Costs
A robotic arm is often purchased for its productivity benefits, but long-term value depends on reliability and manageable maintenance. Preventive maintenance typically includes inspecting cables and hoses, checking bolt torque, cleaning fans and filters, monitoring backlash and unusual noise, and lubricating joints according to manufacturer schedules. Some robots use grease-packed gearboxes designed for long intervals; others require more frequent servicing depending on load and duty cycle. End effectors often need the most attention because they contact parts directly and experience wear. Vacuum cups degrade, gripper pads wear out, and cutting or dispensing tools require regular replacement. Establishing a maintenance routine that includes spare parts planning reduces downtime and prevents small issues from becoming expensive failures. For example, replacing a worn cable carrier early can prevent intermittent sensor faults that are difficult to diagnose and disruptive to production.
Lifecycle cost also includes energy use, consumables, and the cost of downtime. Modern robotic arm controllers offer diagnostics that track motor load, temperature, and error history, which can support predictive maintenance strategies. Vibration or current signatures can reveal developing mechanical issues. Software updates and backups are another critical aspect; losing a validated robot program can be a major setback, so version control and secure backups should be standard practice. Training matters as well: a well-trained team can recover from faults quickly, adjust programs safely, and recognize early warning signs. When considering total cost of ownership, it’s useful to look beyond the purchase price and evaluate support availability, spare part lead times, and the maturity of the vendor’s service network. A robotic arm that is slightly more expensive up front may be less costly over its lifetime if it offers better diagnostics, easier servicing, and stronger vendor support. Reliability is not just a specification; it is the outcome of good design, correct application, and disciplined operational practices.
Trends and Innovations: AI, Digital Twins, and Advanced Materials
Robotic arm technology is evolving rapidly, driven by better sensors, faster controllers, and improved software. AI-based perception is making it easier for robots to recognize objects in complex scenes, enabling more reliable bin picking and flexible sorting. Learning-based approaches can help optimize grasp selection and adapt to variations in packaging or part geometry. At the same time, many deployments still rely on deterministic methods for safety and predictability, so the practical trend is often a hybrid: AI helps interpret the environment, while classical control executes the motion with known constraints. Digital twins are also becoming common. A digital twin is a virtual model of the robotic arm and its cell, used to simulate cycle time, validate reach, test collision avoidance, and optimize layouts before physical installation. This reduces commissioning time and helps teams explore “what-if” scenarios, such as adding a second robot or changing conveyor speed.
Materials and mechanical design are improving as well. Lighter links reduce inertia and enable faster motion with lower energy consumption. Improved gear technologies and better sealing extend service life in harsh environments. Force control and torque sensing at the joints are becoming more accessible, expanding the range of tasks that a robotic arm can perform safely near people or with delicate parts. Standardization is another trend: more end-of-arm tooling uses modular interfaces, and more controllers support common industrial protocols, making integration less vendor-locked. Sustainability concerns are influencing choices too, with attention to energy efficiency and the ability to reconfigure automation rather than discard it when products change. As these innovations mature, the robotic arm becomes less of a specialized machine reserved for high-volume factories and more of a configurable platform that can be deployed in smaller facilities, laboratories, and custom production environments. The most successful adopters treat automation as a continuous capability—supported by simulation, data, and training—rather than a one-time equipment purchase.
Choosing the Right Robotic Arm for a Specific Use Case
Selecting a robotic arm starts with a clear definition of the task requirements. Payload and reach are the obvious parameters, but many projects succeed or fail based on details: the weight and dimensions of the end effector, the required tool orientation, the available floor space, and the variability of part presentation. If the arm must reach into a machine, clearances and approach angles matter. If the process involves contact, such as sanding or insertion, force control capabilities and stiffness become important. Speed requirements should be based on takt time and realistic motion profiles rather than theoretical maximums. Environmental requirements also shape the decision: washdown environments may require stainless or sealed designs; dusty environments may require protective covers; explosive atmospheres require specialized compliance. The controller’s capabilities—vision integration, fieldbus support, safety functions, and offline programming compatibility—can be just as important as the arm itself.
Business considerations play a major role. A robotic arm that is easy to program and maintain can reduce reliance on specialized experts and shorten downtime. Tooling and fixtures should be included in the budget from the beginning, as they often represent a significant portion of project cost. It is also wise to plan for future expansion: a slightly higher payload class or an extra axis capability can provide flexibility for later product changes. Vendor ecosystem matters: availability of spare parts, training resources, and local service can dramatically affect long-term success. Before committing, many teams run a proof of concept, either in-house or with an integrator, to validate that the robot can achieve the required cycle time and quality. The best choice is not necessarily the most powerful or the most feature-rich; it is the robotic arm that matches the process constraints, integrates smoothly into the workflow, and delivers stable performance with manageable lifecycle costs.
Conclusion: Building Long-Term Value with a Robotic Arm
A robotic arm delivers the most value when it is treated as a core part of a process, not just a standalone machine. Strong results come from aligning mechanical capability with real task demands, selecting appropriate tooling, and integrating sensing and communication so the robot can respond to variation. Safety and maintainability should be designed into the cell from the start, ensuring that operators can work confidently and technicians can service equipment without excessive disruption. With careful planning, a robotic arm can improve throughput, stabilize quality, reduce exposure to hazardous tasks, and create better visibility into production performance through data and diagnostics.
As technology advances, the robotic arm continues to become more flexible, more connected, and easier to deploy across different industries and facility sizes. The combination of improved control, better perception, modular end effectors, and simulation tools makes it practical to automate tasks that were once considered too variable or too complex. Whether the goal is high-volume production, high-mix changeovers, or safer handling of challenging materials, a robotic arm can be configured to support long-term operational resilience when the selection, integration, and maintenance strategy are handled with the same rigor as the process itself.
Watch the demonstration video
In this video, you’ll learn how a robotic arm works, from its main parts and joints to the motors and sensors that control movement. It explains how the arm is programmed to pick, place, and handle objects with precision, and shows real examples of where robotic arms are used in manufacturing, labs, and everyday automation.
Summary
In summary, “robotic arm” is a crucial topic that deserves thoughtful consideration. We hope this article has provided you with a comprehensive understanding to help you make better decisions.
Frequently Asked Questions
What is a robotic arm?
A robotic arm is a programmable mechanical manipulator with multiple joints that moves tools or parts to perform tasks like picking, placing, welding, or assembly.
What are the main parts of a robotic arm?
A typical **robotic arm** is built from several key components: a sturdy base, interconnected links and joints for movement, actuators (like motors) to drive that motion, sensors to track position and force, a controller to coordinate everything, a power supply to keep it running, and an end effector—such as a gripper or specialized tool—to handle the actual task.
How many degrees of freedom (DoF) do robotic arms need?
The right choice depends on what you need the **robotic arm** to do: a 4–6 DoF setup handles many standard industrial pick-and-place tasks, while 6–7 DoF is more common when you need smoother, more flexible positioning and precise orientation in tighter or more complex workspaces.
What types of robotic arms are most common?
Popular options range from articulated (jointed) models and SCARA units to Cartesian (gantry) and delta (parallel) designs, along with collaborative cobots—each type of **robotic arm** tailored to specific requirements for speed, reach, and precision.
How are robotic arms programmed?
They can be programmed via teach pendants, offline simulation software, vendor-specific languages, or higher-level frameworks like ROS using motion planning and control libraries.
What should I consider when choosing a robotic arm?
When choosing a **robotic arm**, it’s important to weigh the essentials: payload capacity, reach, repeatability, operating speed, degrees of freedom (DoF), and whether it supports the end-effector you need. You’ll also want to consider safety requirements, how easily it integrates with vision or PLC systems, and the total cost of ownership over its lifetime.
📢 Looking for more info about robotic arm? Follow Our Site for updates and tips!

Trusted External Sources
- mechArm – Elephant Robotics
Bring your ideas to life by automating tasks with mechArm’s ultra-compact 6-axis **robotic arm**, featuring impressive reach and a 250g payload. Perfect for makers, designers, and anyone who loves to build and create.
- Entry-level Robot Arm : r/robotics – Reddit
Jan 12, 2026 … I’m doing homework on the landscape of cheap, 4DOF/6DOF hobby robotic arms (<=2k$). The only requirements that I have are that they are open-source, ROS2 …
- ROBOTIC ARM INSTRUMENT CARD WHITE [25/BX] CSRC100
Buy ROBOTIC ARM INSTRUMENT CARD WHITE [25/BX] from Shop STERIS. Purchase product number CSRC100 and other STERIS products online.
- Looking for an open source robotic arm – Reddit
Jul 14, 2026 … Some options I gathered are : KAUDA robotica arm, Thor robotic arm, Niryo Ned 2, Dobot magician. Out of these Ned 2 looks pretty good but anyone have any …
- A prospective double-blinded randomised control trial comparing …
… versus robotic arm-assisted mechanically aligned total knee arthroplasty. Trials. 2026 Feb 18;21(1):194. doi: 10.1186/s13063-020-4123-8. Authors.